
|
| |||
|
Разделы
Главная
Сапромат
Моделирование
Взаимодействие
Методы
Инновации
Индукция
Исследования
Факторизация
Частоты
Популярное
Как составляется проект слаботочных сетей?
Как защитить объект?
Слаботочные системы в проекте «Умный дом»
Какой дом надежнее: каркасный или брусовой?
Как правильно создавать слаботочные системы?
Что такое энергоэффективные дома?
|
Главная » ANSYS 1 ... 6 7 8 9 10 11 12 ... 64 перемещений. Элементом, воспринимающим только растяжение или только сжатие, является элемент LINK 10. Исходные данные элемента На рисунке 2.6 показаны геометрия элемента, расположение узлов и его система координат. Элемент определяется двумя узлами, площадью поперечного сечения, начальной деформацией и свойствами материала. Ось X системы координат элемента направлена вдоль элемента (по длине), от узла I к узлу J. Начальная деформация в элементе (ISTRN) вычисляется в виде Д/L, где Д является разницей между длиной элемента L (определяемой по координатам узлов I и J) и длиной элемента при нулевом значении продольной деформации. Список исходных данных элемента Узлы - I, J. Степени свободы - UX, UY, UZ. Геометрические характеристики: - AREA - площадь поперечного сечения; - ISTRN - начальная деформация. Свойства материала - EX, ALPX (или СТЕХ или THSX), DENS, DAMP. Нагрузки, прикладываемые к поверхности элемента - нет. Объемные нагрузки: - температуры - T(I), T(J); - поток частиц - FL(I), FLO). Специальные возможности: - пластичность; - ползучесть; - радиационное набухание; - увеличение жесткости при наличии нагрузок; - большие перемещения; - рождение и смерть. Признаки KEYOPT - нет. Расчетные данные элемента Расчетные данные, связанные с элементом, делятся на два вида: - узловые объекты, такие как узловые перемещения, включены в полное узловое решение; - дополнительные элементные объекты, перечисленные в табл. 2.6. 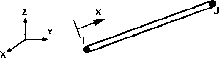 Рис. 2.6. Геометрияэлемента LINK8
2.10.7. LINK 10 - стержневой элемент, воспринимающий только растяжение или сжатие Описание элемента Элемент LINK10 является трехмерным (3D) стержневым элементом, обладающим уникальной особенностью использования билинейной матрицы жесткости, порождающей одноосный элемент, воспринимающий только растяжение (или только сжатие). При использовании опции только растяжения в случае входа, элемента в сжатие его жесткость удаляется (что позволяет моделировать условия ослабления натяжения троса или цепи). Данная возможность полезна для статических расчетов вант (натяжных тросов), в которых полный трос моделируется одним элементом. Подобная возможность может также использоваться в динамических расчетах (с учетом эффектов инерции или демпфирования), где желателен учет возможности ослабления натяжения элементов, но само перемещение ослабленных элементов не вызывает явного интереса. Данный элемент является стержневой версией элемента SHELL41 с KEYOPT(l) - 2, опцией ткани. Если цель расчета состоит в исследовании движения элементов (без ослабленных элементов), вместо данного элемента следует использовать аналогичные элементы, не теряющие формы, например LTNK8 или РТРЕ59. .Элемент LINK10 не должен также использоваться для статических сходящихся задач, в которых конечный результат, по определению, является растянутой структурой, но в процессе итерационного расчета возможно ослабление отдельных элементов. В таких случаях должны использоваться иные элементы, или, при желательности использования элементов LINK10, метод медленной динамики . Элемент LINK 10 имеет три степени свободы в каждом узле: перемещения в направлении осей X, Y и Z узловой системы координат. При использовании опций только растяжения (троса) или только сжатия (зазора) никакой изгибной жесткости в элементе нет, но для ее добавления можно к каждому элементу LINK10 добавлять наложенный элемент балки с малой площадью поперечного сечения. Для элемента могут применяться возможности увеличения жесткости при приложении нагрузок и больших перемещений. Исходные данные элемента Геометрия, расположение узлов и система координат для данного элемента показаны на рис. 2.7. Элемент определяется двумя узлами, площадью поперечного сечения, начальной деформацией или зазором и свойствами изотропного материала. Ось X элемента ориентируется по длине элемента от узла I к узлу J. Начальная деформация в элементе (ISTRN) определяется в виде Д/L, где Д -различие между длиной элемента L (как определено координатами узлов I и J) и длиной при нулевых деформациях Lo. Для опции троса отрицательная деформация указывает на состояние начального ослабления (провисания). При использовании опции зазора положительная деформация указывает состояние зазора (как показано на рис. 2.7). Зазор должен указываться в виде значения на единицу длины . Признак KEYOPT(2) используется для приложения малой жесткости (АЕ х х 10 6/L) в открытом зазоре или к ослабленному тросу для предотвращения свободного перемещения незакрепленных фрагментов модели при открытом зазоре или ненатянутом тросе. Список исходных данных элемента Узлы - I, J. Степени свободы - UX, UY, UZ. Геометрические характеристики: - AREA - площадь поперечного сечения; 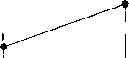 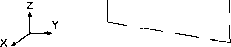 Рис. 2.7. Геометрия элемента LINK 10 - ISTRN - начальная деформация; - при KEYOPT(3) = 0 и ISTRN, меньшем нуля, кабель исходно ослаблен (провисает); - при KEYOPT(3) = 1 и ISTRN, большем нуля, зазор исходно открыт. Свойства материала - EX, ALPX (или СТЕХ или THSX), DENS, DAMP. Нагрузки, приложенные к поверхности - нет. Объемные нагрузки: - температуры - T(I), T(J). Специальные возможности: - нелинейность; - увеличение жесткости при приложении нагрузки; - большие перемещения; - рождение и смерть. KEYOPT(2) - признак жесткости в ненатянутом тросе: - О - жесткости, связанной с ослабленным тросом, нет; - 1 - ослабленному тросу присваивается малая жесткость в продольном направлении; - 2 - ослабленному тросу присваивается малая жесткость в продольном и перпендикулярных направлениях (применяется только при использовании увеличения жесткости при приложении нагрузки). KEYOPT(3) - признак опции растяжения или сжатия: - О - опция только растяжения (троса); - 1 - опция только сжатия (зазора). Расчетные данные элемента Расчетные данные, связанные с элементом, делятся на два вида: - узловые объекты, такие как узловые перемещения, включены в полное уз; ловое решение; - дополнительные элементные объекты, показанные в табл. 2.7. Таблица 2.7. Описание расчетных данных элемента LINK 10 Объект Определение NODES МАТ VOLU: XC.YC.ZC STAT TEMP MFORX SAXL EPELAXL EPTHAXL EPINAXL Номер элемента Узлы - I, J Номер материала Объем Координаты точки, для которой выводятся результаты Состояние элемента Температуры T(l), T(J) Усилие в системе координат элемента Осевое напряжение Осевая упругая деформация Осевая температурная деформация Осевая начальная деформация , 2.10.8. LINK11 - линейный силовой привод Описание элемента Элемент LINK11 может использоваться для моделирования гидравлических цилиндров и иных моделей, испытывающих большие повороты. LINK11 является элементом с одной осью, имеющим свойства растяжения - сжатия с тремя степенями свободы в каждом узле: перемещениями в направлении осей X, Y и Z узловой системы координат. Элемент не может нагружаться изгибными или крутильными нагрузками. Исходные данные элемента Геометрия элемента и расположение узлов показаны на рис. 2.8. Элемент определяется двумя узлами, жесткостью, вязким демпфированием и массой. Начальная длина элемента Lo и ориентация определяются расположением его узлов. L +MSTROKE Рис. 2.8. Геометрия элемента LINK11 Величина хода рабочего органа (по длине элемента) определяется с помощью нагрузок, прикладываемых к поверхности элемента путем использования метки PRES. Рабочий ход определяется относительно нулевого значения усилия в элементе. Усилие может быть определено в той же самой манере как альтернатива рабочего хода. Список исходных данных элемента Узлы-IJ. Степени свободы - UX, UY, UZ. Геометрические характеристики: - К - жесткость (имеет размерность усилие/длина); - С - коэффициент вязкого демпфирования (имеет размерность усилие* время/длина); - М - масса. Свойства материала - DAMP. Нагрузки, приложенные к поверхности: - Грань 1 - рабочий ход; - Грань 2 - осевое усилие.  Объемные нагрузки - нет. Специальные возможности: - увеличение жесткости при приложении нагрузки; - большие перемещения; - рождение и смерть. Признаки KEYOPT - нет. Расчетные данные элемента Расчетные данные, связанные с элементом, делятся на два вида: - узловые объекты, такие как узловые перемещения, включены в полное узловое решение; - дополнительные элементные объекты, перечисленные в табл. 2.8.
2.10.9. CONTAC12 - двухмерный контактный элемент типа точка с точкой Описание элемента Элемент CONTAC12 представляет собой две поверхности, которые могут входить в физический контакт или выходить из него и могут скользить относительно друг друга. Элемент в состоянии поддерживать только сжатие в направлении нормали к элементу и сдвиг (кулоново трение) в поперечном (касательном) па правлении. Элемент имеет две степени свободы в каждом узле: линейные перемещения в направлении X и Y узловой системы координат. Элемент может быть предварительно нагружен в направлении нормали или может иметь зазор. Если зазор закрыт и скольжение отсутствует, указываемая жесткость действует в нормальном и поперечном направлениях. Дополнительно могут применяться иные контактные элементы, такие как CONTAC26, COMBIN40, CONTAC48, CONTAC49, CONTAC52. Исходные данные Геометрия, расположение узлов и координатная система элемента показаны на рис. 2.9. Элемент определяется двумя узлами, углом определения направления взаи-  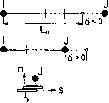 © определяет ориентацию элемента Y (или ось) I Положительное скольжение Узлы могут совпадать X (или радиус) (ЗТАТ или START = +2) Рис. 2.9. Элемент CONTACT 2 модействия, двумя значениями жесткости (KN и KS), начальным перемещением, определяющим интерференцию (внедрение) или зазор (INTF), и начальным состоянием элемента (START). Система координат элемента (s - п) определяет взаимодействие. Угол 9 (ТНЕТА) может являться входным значением (или вычисляемым), указывается в градусах и измеряется от направления оси X глобальной системы координат в направлении оси s системы координат элемента. Ориентация направления взаимодействия может быть указана в зависимости от значения признака KEYOPT(2) путем указания величины ТНЕТА или по координатам узлов. Жесткость в направлении нормали KN должна быть основана на жесткости контактирующих поверхностей. Рекомендации по назначению значения KN см. выше в текущей главе. В ряде случаев (таких как расчеты с начальным внедрением (интерференцией), при отсутствии сходимости, или излишнем расчетном внедрении) следует использовать изменение значения KN между шагами нагрузки или при повторном вызове расчета для получения точного сходящегося решения. Жесткость скольжения KS представляет собой жесткость в касательном направлении при наличии упругого кулонова трения (р > 0.0 и KEYOPT(l) = 0). Коэффициент трения р указывается в виде свойства материала MU и может определяться по среднему значению температуры в двух узлах элемента. Жесткость также может быть вычислена как отношение максимальной действующей силы к максимальному перемещению на поверхности. По умолчанию KS равно KN. При расчетах осесимметричных задач значения жесткости должны соответствовать полным 360° окружности модели. Начальное перемещение интерференции Д определяет начальную интерференцию, или внедрение (положительное значение), или размер зазора (отрицательное значение). Значение может быть указано в виде геометрической характеристики INTF или при KEYOPT(4) = 1 автоматически вычисляется по координатам узлов. Жесткость связана с нулевым или положительным внедрением. Начальное состояние элемента START используется при определении предыдущего контактного состояния при вызове первого промежуточного шага. Это входное значение используется для изменения условия, связанного с интерференцией, вычисленной на основе координат узлов, и полезно для предупреждения вида окончательного контактного взаимодействия и для сокращения числа итераций, требуемых для достижения сходимости решения. Взаимосвязь сил и перемещений в зоне контактного взаимодействия разделяется на нормальное и касательное (скольжение). Состояние элемента в начале первого промежуточного шага определяется параметром START. Если контакт открыт, жесткость, связанная с данным элементом на данном промежуточном шаге, отсутствует. Если контакт является закрытым н имеет склеивание, значение KN используется для определения сопротивления в направлении зазора, а значение KS - сопротивления в направлении скольжения. Если контакт является закрытым и имеет скольжение, значение KN используется для определения сопротивления в направлении зазора, а для определения предельной силы сопротивления скольжению используется значение uFN. Если сила в направлении нормали FN отрицательна, контактное взаимодействие в направлении нормали считается существующим, а элемент работает как упругая линейная связь. Если сила в нормальном направлении становится положительной, контакт нарушается и никакие усилия в нем не передаются. Признак KEYOPT(3) может быть использован для введения малой упругой связи через контактный стык, полезной для предотвращения перемещений тел как жесткого целого в статических задачах. Жесткость малой упругой связи вычисляется как произведение жесткости в нормальном направлении KN на множитель. По умолчанию множитель равен 10~в и может быть изменен путем указания геометрической характеристики REDFACT. Если FN < 0 и абсолютное значение касательной (поперечной) силы FS меньше, чем uFN, контактный стык в поперечном направлении считается склеенным (неподвижным) и в поперечном направлении работает как упругая линейная связь. При условиях FN < 0 и FS - p.FN имеется скольжение. При значении признака KEYOPT(l) = 1 используется жесткое кулоново трение, значение KS не используется, а свойства упругого защемления игнорируются. Данная опция используется для задач с управлением перемещениями или для ряда динамических задач, в которых преобладает скольжение. При данной опции на первом промежуточном шаге касательное (поперечное) сопротивление не учитывается. Единственное используемое свойство материала - коэффициент трения и. Для поверхностей, не имеющих трения, должно указываться нулевое значение. Для задач, учитывающих тренне, полезно (и фактически иногда требуется) использование команды NROPT,UNSYM в задачах, где перемещения в нормальном и поперечном направлениях жестко связаны, например в задачах внедрения клина. Список исходных данных элемента Узлы - I,J. Степени свободы - UX, UY. Геометрические характеристики: - ТНЕТА - угол интерференции; - KN - нормальная жесткость; - INTF - начальное значение интерференции (наложения) или зазора. Отрицательное значение INTF воспринимается как исходно открытый зазор; - START - начальное состояние элемента. Если START = 0.0 или является пробелом, для геометрической характеристики INTF определяется начальное условие наличия зазора. Если START = 1.0, зазор исходно считается закрытым и не имеет скольжения (если MU / 0), или узел J может скользить при MU - 0.0. Если START = 2.0, зазор исходно считается закрытым и узел J может скользить вправо от узла I. Если START = - 2.0, зазор исходно считается закрытым и узел J может скользить влево от узла I. Если START = 3.0, зазор исходно считается открытым. - KS - жесткость в поперечном направлении; - REDFACT - множитель уменьшения значения KN. Свойства материала - MU. Нагрузки, приложенные к поверхности - нет. Объемные нагрузки: - температуры - T(I), T(J). Специальные возможности: - нелинейность; - адаптивный спуск. KEYOPT(l) - признак типа трения (используется только при MU > 0.0): - 0 - упругое кулоново трение (KS используется для определения жесткости при склеивании); - 1 - жесткое кулоново трение (вычисляются только силы сопротивления). KEYOPT(2) - признак использования угла ориентации: - 0 - ориентация определяется геометрической характеристикой ТНЕТА; - 1 - опция цилиндрического зазора (значение ТНЕТА определяется направлением смещения, а исходное значение геометрической характеристики ТНЕТА игнорируется). KEYOPT(3) - признак наличия слабой упругой связи в открытом зазоре: - 0 - слабая упругая связь в открытом зазоре отсутствует; - 1 - слабая упругая связь в открытом зазоре имеется. KEYOPT(4) - признак интерференции или зазора: - 0 - значение интерференции (или зазора) основано на геометрической характеристике INTF; - 1 - значение интерференции (или зазора) основано на координатах узлов (геометрическая характеристика INTF игнорируется). KEYOPT(7) - признак контроля приращением шага по времени. Следует обратить внимание, что данная опция предварительно должна быть активирована на уровне процедуры командой SOLCONTROL,ON. Наиболее часто для данного элемента употребляется команда SOLCONTROL,ON,ON. Если применена команда SOLCONTROL,ON,OFF, данная опция не активизируется. - 0 - прогнозирование шага по времени производится для обеспечения минимального приращения шага по времени всякий раз при изменении состояния контакта в элементе; - 1 - прогнозирование шага по времени производится для обеспечения рационального приращения шага по времени (рекомендуемая опция). Расчетные данные, связанные с элементом, делятся на два вида: - узловые объекты, такие как узловые перемещения, включены в полное узловое решение; - дополнительные элементные объекты, перечисленные в табл. 2.9. Значение USEP определяется на основе перемещения в направлении нормали к элементу un в направлении оси X системы координат элемента между взаимодействующими узлами в конце текущего промежуточного шага. Таким образом, USEP - (un)j- (un), - А. Это значение используется для определения силы, действующей в направлении нормали FN. При расчетах осесимметричных задач значения силы соответствуют полным 360° окружности модели. Значение, обозначенное через UT, является полным линейным перемещением. Максимальное значение, выводимое в качестве силы скольжения FS, составляет pFN. STAT описывает состояние элемента в конце промежуточного шага. Если STAT = 1, зазор закрыт и скольжения нет, Если STAT = 3, зазор открыт. Значение STAT = +1 показывает, что узел J скользит в положительном направлении по отношению к узлу I. Значение STAT = -2 показывает, что узел J скользит в отрицательном направлении по отношению к узлу I. Для поверхностей, свободных от трения (д = 0.0), состояние элемента может быть STAT = ±2 или 3. Значение ТНЕТА является или исходным углом ориентации (при KEYOPT(2) - 0), или расчетным значением угла (при KEYOPT(2) = 1).
1 ... 6 7 8 9 10 11 12 ... 64 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
| |||