
|
| |||
|
Разделы
Главная
Сапромат
Моделирование
Взаимодействие
Методы
Инновации
Индукция
Исследования
Факторизация
Частоты
Популярное
Как составляется проект слаботочных сетей?
Как защитить объект?
Слаботочные системы в проекте «Умный дом»
Какой дом надежнее: каркасный или брусовой?
Как правильно создавать слаботочные системы?
Что такое энергоэффективные дома?
|
Главная » ANSYS 1 ... 5 6 7 8 9 10 11 ... 64 Таблица 2.3. Описание расчетных данных элемента ВЕАМЗ (продолжение) Объект Определение . МАТ Номер материала VOLU: Объем XC.YC Координаты точки вывода результатов TEMP Температуры T1, T2, T3, T4 PRES Давление Р1 в узлах I и J; OFFST1 в I и J; Р2 в I и J; OFFST2 в I и J; РЗ в I; Р4 в J SDIR Осевое напряжение растяжения - сжатия SBYT Изгибное напряжение на ребре балки +Y SBYB Изгибное напряжение на ребре балки -Y SMAX Максимальное напряжение (осевое + изгибные) SMIN Минимальное напряжение (осевое - изгибные) EPELDIR Упругая деформация растяжения - сжатия на концах EPELBYT Изгибная упругая деформация на ребре балки +Y EPELBYB изгибная упругая деформация на ребре балки -Y EPTHDIR Температурная деформация растяжения - сжатия на концах EPTHBYT Изгибная температурная деформация на ребре балки +V EPTHBYB Из1 ибная температурная деформация на ребре балки -Y EPINAXL Начальная деформация растяжения - сжатия в элементе MFOR(X, Y) Компоненты усилий в элементной системе координат в направлениях X и Y MMOMZ Момент о элементной системе координат о направлении Z 2.10.4. ВЕАМ4 - трехмерная упругая балка Описание элемента Элемент ВЕАМ4 является элементом с одной осью, имеющим возможности воспринимать рас жжение, сжатие, кручение и изгиб. Элемент имеет шесть степеней свободы в каждом узле: перемещения в направлении осей X, Y, Z и повороты вокруг этих осей. Элемент имеет свойства изменения жесткости при приложении нагрузок и больших перемещений. При расчетах больших перемещений (больших поворотов) используется опция согласованной касательной матрицы жесткости. Скошенной несимметричной упругой балкой является элемент ВЕАМ44, а элементом балки со свойствами пластичности - элемент ВЕАМ24. Исходные данные Геометрия, расположение узлов и координатная система элемента показаны на рис. 2.4. Элемент определяется двумя узлами, площадью поперечного сечения, двумя моментами инерции сечения (IZZ и IYY), двумя толщинами (TKY и TKZ) и ориентационным углом (6) относительно оси X элемента, моментом инерции кручения (IXX) и свойствами материала. Если значение IXX не указано или равно 0, оно предполагается равным полярному моменту инерции (IYY + IZZ). Значение IXX должно быть положительным и, обычно, меньшим, чем значение полярного момента инерции. Крутильная жесткость элемента уменьшается с уменьшением значения IXX. Присоединенная масса на единицу длины указывается через значение ADDMAS. Ось х элемента ориентирована от узла I (первый конец) в направлении узла J (второй конец). При использовании элемента с двумя узлами ориентация эле- (Если узел К пропущен и 0 = 0°, ось у системы координат элемента параллельно плоскости XY 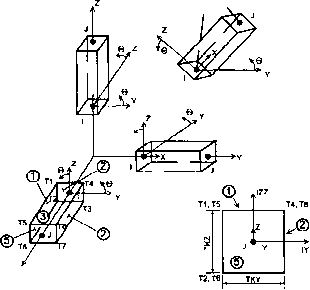 T3.T7 Рис. 2.4. Трехмерная упругая балка ВЕАМ4 мента по умолчанию (9 - 0°) автоматически вычисляется для совпадения с плоскостью XY. Несколько вариантов ориентации показаны на рис. 2.4. Для случая, в котором элемент параллелен оси Z глобальной системы координат (или в случае отклонения от таковой не более чем на 0.01 %), элементная ось Y ориентируется параллельно глобальной оси Y (как показано). Для контроля пользователем ориентации элемента относительно оси X элемента применяется угол 0 (ТНЕТА) или третий, необязательный, узел. Если указаны оба варианта, приоритет имеет ориентация по третьему узлу. Третий узел (К), если используется, определяет плоскость (совместно с узлами I и J), в которой лежат оси X и Z элементной системы координат (как показано). Если элемент используется для расчета с учетом эффекта больших деформаций, следует учитывать, что расположение третьего узла (К) или угол (ТНЕТА) используется только для начальной ориентации элемента. Начальные деформации в элементе (ISTRN) определяются на основании отношения A/L, где А - разница между длиной элемента L (определяемой как расстояние между узлами I и J) и длиной, при которой реализованы нулевые деформации. Коэффициенты поперечных (сдвиговых) перемещений (SHEARZ и SHEARY) используются только в случае учета сдвиговых эффектов. Нулевые значения SHEARZ и SHEARY могут использоваться для игнорирования поперечных (сдвиговых) перемещений в отдельных направлениях. Признак KEYOPT(2) используется при применении согласованной касательной матрицы жесткости (то есть матрицы, состоящей из основной матрицы жесткости, к которой добавлена согласованная матрица изменения жесткости при приложении нагрузки) в задачах с большими перемещениями (команда NLGEOM, ON). В случае применения данного признака может обеспечиваться ускоренная сходимость геометрически нелинейных задач, в том числе нелинейная устойчивость и последующие за ней расчеты. Однако использование этого признака не рекомендуется в случаях применения данного элемента для моделирования жестких связей или при наличии групп связанных узлов. Получаемое при этом резкое изменение жесткости модели не позволяет применять согласованную касательную матрицу жесткости. Признак KEYOPT(7) применяется для несимметричной матрицы гироскопического демпфирования (применяемой при исследовании динамики вращающихся роторов). Частота вращения указывается через геометрическую характеристику SPIN (размерность радиан в единицу времени, положительное направление соответствует положительному направлению оси X элемента). В данном случае элемент должен обладать свойствами симметрии (например, IYY - IZZ и SHEARY = SHEARZ). Признак KEYOPT(9), используемый для определения результатов в промежуточных точках, не применяется в следующих случаях: - используется эффект изменения жесткость при приложении нагрузок (команда SSTIF, ON); - приложена более чем одна компонента угловой скорости (команда OMEGA); - любые угловые скорости или ускорения приложены командами CGOMGA, DOMEGA или DCGOMG. Список исходных данных элемента Узлы - I, J, К (ориентировочный узел К является необязательным). Степени свободы - UX, UY, UZ, ROTX, ROTY, ROTZ. Геометрические характеристики: - AREA - площадь поперечного сечения; - IZZ, IYY - моменты инерции поперечного сечения; - TKZ - толщина относительно оси Z; - TKY - толщина относительно оси Y; - ТНЕТА - ориентационный угол относительно оси X; - ISTRN - начальная деформация; - IXX - момент инерции кручения; - SHEARZ - коэффициент сдвиговой деформации относительно оси Z; - SHEARY - коэффициент сдвиговой деформации относительно оси Y; - SPIN - скорость вращения (требуется при KEYOPT(7) = 1); - ADDMAS - добавленная масса (отнесенная к единице длины балки). Свойства материала - EX, ALPX, DENS, GXY, DAMP. Нагрузки, прикладываемые к поверхности элемента: - давление: грань 1 (I-J) (направление по нормали -Z), грань 2 (I-J) (направление по нормали -Y), грань 3 (I-J) (направление по касательной +Х), грань 4 (I) (направление по оси +Х), грань 5 (J) (направление по оси -X), для противоположного направления указываются отрицательные значения. Объемные нагрузки: - температуры: Т1, Т2, ТЗ, Т4, Т5, Т6, Т7, Т8. Специальные возможности: - изменение жесткости при приложении нагрузки; - большие перемещения; - рождение и смерть. KEYOPT(2) - признак изменения жесткости при приложении нагрузки: - О - используется только основная матрица жесткости, в том числе при действии команды NLGEOM,ON; эффект изменения жесткости при нагруже-нии используется в задачах линейной устойчивости или других линейных задачах, с наличием начальных напряжений вызывается отдельной командой PSTRES,ON; - 1 - применяется согласованная касательная матрица жесткости (то есть матрица, состоящая из основной матрицы жесткости, к которой добавлена согласованная матрица изменения жесткости при приложении нагрузки), в том числе при действии команды NLGEOM.ON; при значении признака KEYOPT(2) = 1 действие команды SSTIF,ON игнорируется; следует обратить внимание, что вызов двух команд SOLCONTROL.ON и NLGEOM,ON автоматически приводит к назначению значения признака KEYOPT(2) = 1, то есть к использованию согласованной касательной матрицы жесткости; - 2 - применяется для отказа от использования согласованной касательной матрицы жесткости (то есть матрицы, состоящей из основной матрицы жесткости, к которой добавлена согласованная матрица изменения жесткости при приложении нагрузки) при вызове команды SOLCONTROL.ON; в ряде случаев отказ от использования согласованной касательной матрицы жесткости применяется в случае использования элемента как жесткого тела или в случае больших значений геометрических характеристик (real constant); признак KEYOPT(2) = 2 имеет одинаковый смысл с KEYOPT(2) = О, с разницей, что при KEYOPT(2) = 0 аргументы ON или OFF команды SOLCONTROL имеют значение, а признак KEYOPT(2) = 2 не зависит от аргументов команды SOLCONTROL. KEYOPT(6) признак вывода усилий и моментов: - О - компоненты усилий не выводятся; - 1 - компоненты усилий и моментов выводятся в системе координат элемента. KEY0PT(7) - признак использования матрицы гироскопического демпфирования: - О - матрица гироскопического демпфирования не используется; - 1 - матрица гироскопического демпфирования используется; геометрическая характеристика SPIN должна быть больше нуля; значения геометрических характеристик IYY и IZZ должны быть равны. KEYOPT(9) - признак вывода данных в N дополнительных точках вывода между узлами I и J: - N- вывод проводится в N дополнительных точках (JV= 0, 1, 3, 5, 7, 9). KEYOPT(IO) - признак, используемый только при приложении переменных поверхностных нагрузок при помощи команды SFBEAM: - О - геометрическое смещение имеет размерность длины; - 1 - геометрическое смещение приводится в безразмерном виде (то есть в долях длины), от 0.0 до 1.0. Расчетные данные элемента Расчетные данные, связанные с элементом, делятся на два вида: - узловые объекты, такие как узловые перемещения, включены в полное узловое решение; - дополнительные элементные объекты, перечисленные в табл. 2.4. Таблица 2.4. Описание расчетных данных элемента ВЕАМ4 Объект Определение EL Номер элемента NODES Узлы-I.J MAT Номер материала V0LU: Объем ХС, YC, ZC Координаты точки вывода результатов TEMP Температуры T1, T2, T3, T4. T5, T6, T7, T8 PRES Давления Р1 в узлах I и J; OFFST1 в I и J; Р2 в I и J; OFFST2 в I и J; РЗ в I и J; OFFST3 в I и J; P4bI; P5bJ SDIR Осевое напряжение растяжения - сжатия SBYT Изгибное напряжение на ребре балки +Y SBYB Изгибное напряжение на ребре балки -Y SBZT Изгибное напряжение на ребре балки +Z SBZB Изгибное напряжение на ребре балки -Z SMAX Максимальное напряжение (осевое + изгибные) SMIN Минимальное напряжение (осевое - изгибные) EPELDIR Упругая деформация растяжения - сжатия на концах EPELBYT Изгибная упругая деформация на ребре балки +Y EPELBYB Изгибная упругая деформация на ребре балки -Y EPELBZT Изгибная упругая деформация на ребре балки +Z EPELBZB Изгибная упругая деформация на ребре балки -Z EPTHDIR Температурная деформация растяжения - сжатия на концах EPTHBYT Изгибная температурная деформация на ребре балки +Y EPTHBYB Изгибная температурная деформация на ребре балки -Y EPTHBZT Изгибная температурная деформация на ребре балки +Z EPTHBZB Изгибная температурная деформация на ребре балки -Z EPINAXL Начальная деформация растяжения - сжатия в элементе MF0R(X,X Z) Компоненты усилий в элементной системе координат в направлениях X, Yи Z ММОМ(Х, Y, Z) Компоненты моментов в элементной системе координат в направлениях X, Y и Z 2.10.5. COMBIN7 - элемент цилиндрического шарнира Описание элемента Элемент COMBIN7 является трехмерным (3D) элементом цилиндрического шарнира, который может использоваться для соединения двух или более частей модели в общей точке. Возможности данного элемента включают податливость шарнира (или жесткость), трение, демпфирование и некоторые контрольные возможности. Важной возможностью данного элемента является возможность больших перемещений, при которой локальная система координат фиксируется и перемещается совместно со связью. Данный элемент предназначен для использования в задачах кинетостатики и кинетодинамики. Однонаправленным контрольным элементом, имеющим меньшие возможности, является элемент COMBIN37. Аналогичными элементами (без возможностей управления) являются элементы COMBIN14, MASS21, COMBIN39 и COMBIN40. 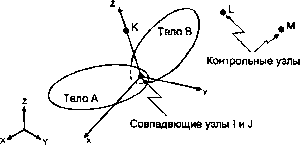 Рис. 2.5. Геомвтрия элемента СОМ ВI N7 Исходные данные элемента Геометрия, расположение узлов и система координат данного элемента показаны на рис. 2.5. Данный элемент определяется в трехмерном (3D) пространстве пятью узлами, являющимися активными узлами (I, J), одним узлом, определяющим начальную ось вращения (К), и контрольными узлами (L, М). Активные узлы должны геометрически совпадать и представлять фактический цилиндрический шарнир, соединяющий фрагменты модели А и В. Фрагмент может являться индивидуальным элементом или набором элементов. Если узел К не определен, то начальная ось вращения соответствует направлению оси Z глобальной декартовой системы координат. Направление локальной системы координат элемента в задачах с большими перемещениями (команда NLGEOM) следует за усредненными перемещениями и поворотами узлов I и J. Элементная система координат XYZ перемещается и поворачивается вместе с шарниром, и ориентация узла К после первой итерации несущественна. Первичная цель использования контрольных узлов заключается в обеспечении в элементе свойства обратной связи. Активные узлы (I, J) имеют шесть степеней свободы, однако пять из них (UX, UY, UZ, ROTX, ROTY) в локальной системе координат соединения имеют некоторый уровень податливости. Этот уровень податливости определяется тремя указываемыми жесткостями: К1 для линейной жесткости в плоскости XY, К2 для жесткости в направлении Z и КЗ для жесткости при поворотах вокруг осей X и Y. Исходные данные массы связи (MASS) и момента инерции (IMASS) равномерно распределены между узлами I и J. Динамика вращения с предварительной закруткой или первичной степени свободы включают крутящий момент трения (TF), крутильное вязкое трение (СТ), крутильную жесткость (К4), начальный крутящий момент (TLOAD), наложенный поворот (ROT) и два различных предела поворота (STOPL и STOPU). Нулевое значение TF соответствует нулевому трению (или свободному вращению), в то время как отрицательное значение устраняет из элемента свойство трения. В случае удаления (TF < 0) трения связь блокируется с жесткостью К4. Связь (шарнир) также блокируется с жесткостью К4 при наличии остановки (достижении предела). Верхний предел поворота (STOPU) представляет допускаемое значение вращения вперед (узла J в сторону от узла I), а нижний предел поворота (STOPL) представляет допускаемое значение вращения назад (узла} в сторону узла I). Нулевые значения обоих пределов удаляют возможность запирания элемента; то есть вращение демпфируется только вязким (СТ) и фрикционным (TF) крутящими моментами. Наложенный поворот (ROT) предназначен для соответствия в локально приложенном повороту шарнире при запирании оси вращения (TF < 0) и указании жесткости (К4 > 0). Начальное состояние геометрической характеристики (START) указывает начальное поведение принудительного поворота: START = 0 не подразумевает никакого принудительного поворота (запирания), значения START = 1 или -1 подразумевают, соответственно, поворот в положительном или отрицательном направлениях. Начальное состояние поворота (START = 1,-1) будет отвергнуто при выполнении условий START = 1, STOPU = 0 и STOPL * 0, или START = -1, STOPL = 0 и STOPU * 0. Требуется использование согласованной системы единиц. Величины К1 и К2 имеют размерность сила/длина и длина*сила/радиан для КЗ и К4. СТ имеет размерность длина*сила*время/радиан, a TF и TLOAD имеют размерность длина*си-ла. MASS имеет размерность усилие*время2/длина, a IMASS имеет размерность усилие*время2/радиан. Величины ROT, STOPL и STOPU имеют размерность радиан. Поведение контроля обратной связи связано с контрольными узлами (L, М). Для указания контрольного значения (CVAL) используются значения признака KEYOPT. Значение KEYOPT(3) указывает степени свободы контрольных узлов, KEYOPT(4) назначает систему координат для указанной степени свободы, a KEYOPT(7) указывает геометрическую характеристику, изменяемую для последующего нелинейного расчета. Опция KEYOPT(l) назначает контрольное значение в виде значения степени свободы, первой или второй производной значения, интегралу значения или времени. Значение KEYOPT(2) определяет поведение степени свободы вращения после достижения предельного значения. При KEYOPT(2) = 0 шарнир может удалять (или устранять) запирание. При KEYOPT(2) = 1 ось шарнира запирается. Элемент может демонстрировать нелинейное поведение в соответствии с функцией RVMOD = RVAL + C1CVALC2 + C3CVALC4, где RVMOD является измененным значением исходного значения геометрической характеристики RVAL (указываемой посредством KEYOPT(7)), значения с CI по С4 являются иными геометрическими характеристиками и определяют форму изменения геометрической характеристики, a CVAL является контрольным значением (см. описание KEYOPT(l)). Значение RVMOD может также быть определено пользовательской подпрограммой USERRC и вызываться посредством KEYOPT(9) - 1. Список исходных данных элемента Узлы - I, J, К, L, М (К, L, М являются необязательными). Степени свободы - UX, UY, UZ, ROTX, ROTY, ROTZ. Геометрические характеристики - Kl, К2, КЗ, К4, СТ, TF, MASS, IMASS, TLOAD, START, STOPL, STOPU, ROT, CI, C2, СЗ, C4, где: - Kl - жесткость в плоскости X-Y; - K2 - жесткость в направлении оси Z; - КЗ - жесткость при повороте относительно осей X и Y; - К4 - жесткость при повороте (относительно оси Z); - СТ - коэффициент вязкого трения при поворотах; - TF - фрикционный момент; - MASS - масса шарнира; - IMASS - момент инерции; - TLOAD - предварительно приложенный момент; - START - начальное состояние; - STOPL - нижний предел поворота (поворот назад ); - STOPU - верхний предел поворота (вращение вперед ); - ROT - наложенный поворот; - С1 - первое скалярное значение в уравнении для RVMOD; - С2 - первый показатель в уравнении для RVMOD; - СЗ - второе скалярное значение в уравнении для RVMOD; - С4 - второй показатель в уравнении для RVMOD. Свойства материала - DAMP. Нагрузки, приложенные к поверхности - нет. Объемные нагрузки - нет. Специальные возможности: - большие перемещения; - нелинейность (если указаны пределы перемещения или трение); - адаптивный спуск. KEYOPT(l) - признак контрольного значения: - 0,1 - контролируется значение (UL-UM) (или UL, если узел М не указан); - 2 - контролируется первая производная значения по времени; - 3 - контролируется вторая производная значения по времени; - 4 - контролируется интеграл значения по времени; - 5 - контролируется значение времени (значение KEYOPT(3) игнорируется). KEYOPT(2) - признак поведения при достижении предела перемещения: - О - при достижении предела поворот в обратную сторону не запрещается; - 1 - при достижении предела поворот ось шарнира запирается (только после первого промежуточного шага). KEYOPT(3) - признак степени свободы контрольных узлов (L и М): - О, 1 - UX (перемещение по оси X); - 2 - UY (перемещение по оси Y); - 3 - UZ (перемещение по оси Z); - 4 - ROTX (поворот вокруг оси X); - 5 - ROTY (поворот вокруг оси Y); - 6 - ROTZ (поворот вокруг оси Z). KEYOPT(4) - признак координат контрольного узла: - О - степени свободы контрольного узла соответствуют узловой системе координат; - 1 - степени свободы контрольного узла соответствуют системе координат элемента (движущейся). KEYOPT(7) - признак геометрической характеристики, используемой для функции RVMOD (применяется при ненулевых значениях С1 или СЗ; см. выше Исходные данные элемента ): - О, 1 - для нелинейной функции используется К1; - 2 - используется К2; - 3 - используется КЗ; - 4 - используется К4; - 5 - используется СТ; - 6 - используется TF; - 7 - используется MASS; - 8 - используется IMASS; - 9 - используется TLOAD; - 10 - используется START; - 11 - используется STOPL; - 12 - используется STOPU; - 13 - используется ROT. KEYOPT(9) - признак метода определения нелинейных свойств: - 0 - для изменения геометрических характеристик используется уравнение для RVMOD; - 1 - геометрические характеристики изменяются пользовательской подпрограммой USERRC (информацию о подпрограммах, написанных пользователем, см. в Руководстве по объектам, программируемым пользователем ). Расчетные данные элемента Расчетные данные, связанные с элементом, делятся на два вида: - узловые объекты, такие как узловые перемещения, включены в полное узловое решение; - дополнительные элементные объекты, показанные в табл. 2.5. Важно обратить внимание, что усилия и перемещения соответствуют элементной (перемещающейся) системе координат. Значение вращательного скольжения (ROTATE) отличается от полного дифференциального вращения (DRZ) вокруг локальной оси вращения в связи с податливостью элемента шарнира. STAT и OLDST относятся, соответственно, к существующему и предыдущему состояниям оси вращения. Общее описание расчетных объектов приведено ниже. Таблица 2.5. Описание расчетных данных элемента COMBIN7 Определение NODES XC.YC, ZC ROTATE CVAL STAT OLDST DUX, DUY, DUZ, DRX, DRY, DRZ RVMOD FORCE(X, Y, Z) MOMENT(X.YZ) RVOLD Номер элемента Активные узлы - I, J Координаты точки, для которой выводятся результаты Значение скольжения вокруг оси вращения Значение в контрольном узле (см. описание KEYOPT(1)) Состояние элемента Состояние элемента на предыдущем шаге по времени Дифференциальные перемещения и повороты в шарнире в системе координат элемента. Например, DUX = UXJ-UXI Значение измененной геометрической характеристики (см. выше Исходные данные элемента ) Усилия в элементе (в системе координат элемента) Моменты в элементе (в системе координат элемента) Знвчение измененной геометрической характеристики на предыдущем шаге по времени 2.10.6. LINK8 - трехмерный (3D) стержень (элемент фермы) Описание элемента Элемент LINK8 может использоваться в различных инженерных задачах. В зависимости от применения этот элемент может использоваться в качестве фермы, провисающего кабеля, связи, упругого элемента (пружины) и т. д. Трехмерный (3D) элемент стержня имеет одну ось, может воспринимать растяжение и сжатие и имеет три степени свободы в каждом узле - перемещения в направлении осей X, Y и Z узловой системы координат. Как стержневой элемент он не имеет свойств изгиба. Элемент имеет свойства пластичности, ползучести, радиационного набухания, увеличения жесткости при наличии нагрузок и больших 1 ... 5 6 7 8 9 10 11 ... 64 |
|
| |||