
|
| |||
|
Разделы
Главная
Сапромат
Моделирование
Взаимодействие
Методы
Инновации
Индукция
Исследования
Факторизация
Частоты
Популярное
Как составляется проект слаботочных сетей?
Как защитить объект?
Слаботочные системы в проекте «Умный дом»
Какой дом надежнее: каркасный или брусовой?
Как правильно создавать слаботочные системы?
Что такое энергоэффективные дома?
|
Главная » Сапромат 1 ... 22 23 24 25 26 27 28 29 13.5. Примеры промышленного применения виртуальной инженерии □ Самолет Boeing 777. Boeing 777 - это первый коммерческий самолет, успешно спроектированный безбумажным методом. Для разработки модели 777 корпорация Boeing организовала 238 межфункциональных групп проектирования и изготовления , ответственных за конкретные продукты. Компания Boeing использовала CAD-систему CATIA от Dassault/IBM и разработала собственную систему предварительной компьютерной сборки EPIC (Electronic Preassembly In Computer). Перед сборкой первого самолета не было изготовлено ни одного физического прототипа, кроме макета носовой части (для проверки критической проводки). Виртуальное прототипирование позволило компании Boeing вовлечь в процесс проектирования самолета заказчиков и операторов (до линейных механиков). Виртуальное прототипирование было настолько успешным, что несоосность при монтаже левого крыла составила всего 0,03 мм. □ Виртуальный прототип локомотивного двигателя фирмы GM. Подразделение Electro-Motive фирмы General Motors разработало локомотивный двигатель GM16V265H мощностью 6300 л. с. путем так называемой виртуальной разработки продукта в сотрудничестве с Unigraphics Solutions. Все детали были представлены в виде трехмерных моделей, и последующий анализ, оптимизация конструкции и программирование станков с ЧПУ и приспособлений проводились для этих моделей. Модель двигателя целиком показана на рис. 13.5. Моделирование позволило обеспечить поставку продукта в сжатые сроки: первый двигатель был построен через 18 месяцев после начала программы, в то время как обычно этот процесс занимает более 36 месяцев. Это позволило также гораздо быстрее провести тесты надежности, что дало GM возможность удовлетворить более жесткие требования к надежности. 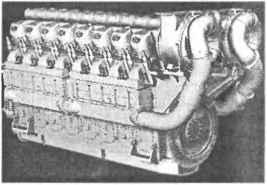 Рис. 13.5. Локомотивный двигатель GM16V265H (с разрешения General Motors) Q Дизайн интерьера салопа автомобиля фирмы Chrysler. Дизайн интерьера салона автомобиля Dodge Durango 1998 г. был разработан методом виртуального проектирования. Член дизайнерской группы (рис. 13.6) сидит в упрощенном макете салона автомобиля, состоящем только из сиденья, руля и педалей. Дизайнер, на котором надеты головной дисплей системы виртуальной реальности, информационные перчатки и датчики движений, рассматривает виртуальный прототип интерьера автомобиля (приборная доска, органы управления радиоприемника, бардачок и окна) и взаимодействует с ним. Виртуальный прототип позволяет легко вносить изменения в дизайн и оценить обзор, доступность и эстетику. Этот метод дает возможность быстро проверять различные варианты дизайна.  Рис. 13.6. Виртуальное проектирование интерьера салона автомобиля (с разрешения Chrysler Corporation) □ Поезд Metrocar2000 в Стокгольме. Metrocar 2000 - это новая система общественного транспорта в Стокгольме, разработанная компанией Adtranz Sweden. Используя программу dVISE от Division, Adtranz сконструировала виртуальные прототипы поездов, включая полностью оснащенные интерьеры с текстурными сиденьями, полами, рекламными плакатами и индикаторной панелью машиниста. Глядя на виртуальный прототип (рис. 13.7), зрители могут получить представление о масштабе, пространственных отношениях и эстетике дизайна. Это позволяет заказчику и инженеру на ранних стадиях проектирования знакомиться с дизайном продукта и вносить в него изменения. □ Проектирование кораблей для Королевского военно-морского флота Великобритании. Морской директорат перспективных проектов Великобритании внедрил виртуальное проектирование в рамках своей новой программы разработки кораблей. С помощью программы ENVISION от Deneb Robotics методом имитации в интерактивном режиме был разработан квартердек для нового корабля. Имитация включала движение корабля (с шестью степенями свободы) и его влияние на работающее оборудование, людей на борту и условия освещения в каютах. Это моделирование позволило инженерам оценить проект и внести в него необходимые изменения. 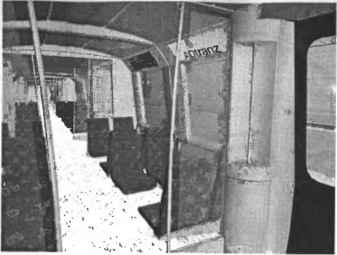 Рис. 13.7. Виртуальный прототип Metrocar 2000 (с разрешения DIVISION, Inc.) 13.6. Программные продукты Компании, производящие программные продукты для виртуального проектирования, множатся. Большая часть этих компаний производят программы с модульной структурой, так что покупатель имеет возможность приобрести именно те модули, которые требуются для его нужд. Имеются модули для виртуальной сборки, цифровой имитации машин производственного участка и имитации производства. В них встроены обширные библиотеки моделей используемых в настоящее время станков с ЧПУ, роботов, компонентов машин и производственных компонентов. Они помогают быстро создать модель собственной системы заказчика. Все производители программного обеспечения расширяют свои модули, закладывая в них более широкий спектр инженерной деятельности и повышая качество имитации. □ Программа ADAMS от Mechanical Dynamics (http: www.adams.com). ADAMS -это программный пакет для имитации и анализа автомобилей. Его сильной стороной является наличие полной линейки модулей для моделирования и анализа (кинематического, статического и динамического), а также имитации. Таким образом, в отличие от других программных пакетов, ориентированных главным образом на кинематическую имитацию, эта программа точно реализует динамическую имитацию. ADAMS/Solver - это ядро линии программных продуктов ADAMS, обеспечивающее формулировку и решение уравнений движения. Модули для моделирования включают ADAMS/Android (анимационное моделирование людей), ADAMS/Driver (моделирование человеческого отклика на имитацию автомобиля), ADAMS/Tire (моделирование шин) и ADAMS/Vehicle (моделирование подвески легковых и грузовых автомобилей). Интеграционный модуль обеспечивает интерфейс к подпрограммам моделирования и анализа ADAMS: ADAMS/FEA, ADAMS/IGES и ADAMS/Linear. Модуль визуализации называется ADAMS/Animation. Кроме того, ADAMS имеет отдельные модули для различных видов транспортных средств, куда входят ADAMS/Car (рис. 13.8) и ADAMS/Rail.  Рис. 13.8. Изображение, созданное модулем ADAMS/Car (с разрешения Mechanical Dynamics, Inc.) □ Программное обеспечение Deneb Robotics, Inc. (http: www.deneb.com). Deneb Robotics производит программы виртуального проектирования, виртуального прототипирования и имитации производственных участков и заводов. Возможные виды имитации включают визуализацию, обнаружение столкновений и оценку длительности производственного цикла. Компанией выпускаются следующие программные продукты: ENVISION (виртуальное проектирование и прототипирование), IGRIP (проектирование роботов и планирование движения) и ERGO (имитация и анализ эргономики и человеческого фактора). В качестве надстроек к базовому модулю IGRIP могут быть подключены специализированные модули UltraArc, UltraGrip, UltraPaint и UltraSpot (рис. 13.9). Имеется модуль имитации дискретных событий QUEST, с помощью которого можно имитировать заводскую линию. Кроме того, имеется модуль VirtualNC для имитации станков с ЧПУ. □ Программное обеспечение Division (http: www.division.com). Изображение, созданное программой виртуального прототипирования dVISE компании Division, показано на рис. 13.10. Эта программа предоставляет средства для импортирования существующих данных из СAD-программ и построения виртуального прототипа. Возможности dVISE включают обнаружение столкновений и проверку свободного пространства при создании и просмотре прототипов. Достоинством этой программы является ее системная архитектура - распределяемая, многопользовательская и открытая. Распределяемая архитектура позволяет выполнять процессы имитации на нескольких серверах. Многопользовательская архитектура поддерживает коллективную разработку, при которой пользователи находятся в разных местах. Открытая архитектура позволяет пользователям расширять функциональность продукта, приспосабливая его к своим нуждам. Семейство продуктов включает следующие программы: dV/WebFly, dV/Player, dV/Review, dV/Mock-up и dV/Reahty. 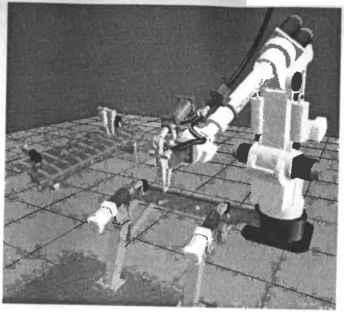 Рис. 13.9. Изображение, созданное модулем UltraSpot (с разрешения Deneb Robotics, Inc.) 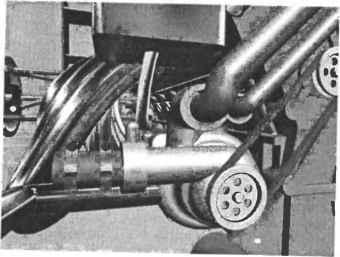 Рис. 13.10. Изображение, созданное программой dVlSE (с разрешения DIVISION, Inc.) J Программное обеспечение Engineering Animations (http: www.ear.com). VisMockUp - это программа виртуального прототипирования от Engineering Animations, делающая упор на трехмерную визуализацию (рис. 13.11). Пользователи могут исследовать сборку и детали компонентов с помощью различных средств визуализации. Система имеет трансляторы для популярных форматов CAD-данных, что позволяет импортировать в нее геометрические модели. Аналитические функции включают обнаружение помех и столкновений. Система поддерживает коллективную разработку, обеспечивая совместное использование базы данных и предоставляя визуальный интерфейс в окне стандартного веб-браузера. 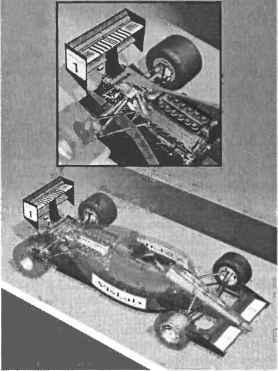 Рис. 13.11. Изображение, созданное программой VisMockUp (с разрешения E.A.I.) □ Программное обеспечение SILMA (http: www.silma.com). Компания SILMA производит серию модулей виртуальной инженерии, включающую модули Soft-Assembly, SoftMachines, CimStation и AdeptRapid. SoftAssembly обеспечивает имитацию последовательности сборки, запись оптимальной траектории и визуализацию. Столкновения выявляются в процессе имитации последовательности сборки. SoftMachine - это модуль для имитации обработки на станке с ЧПУ. Виртуальный станок выполняет стандартные G- и М-коды и имитирует соответствующие процессы обработки. Имитация позволяет выявить ошибки обработки и столкновения. CimStation Robotics - это модуль имитации роботизированного производственного участка. Он использует собственную библиотеку CAD-данных коммерческих роботов для имитации производственной системы. CimStation Inspection (рис. 13.12) - это модуль программирования и имитации координатно-измерительных машин. В нем имеется библиотека кинематических моделей коммерческих координатно-измерительных машин и щупов. 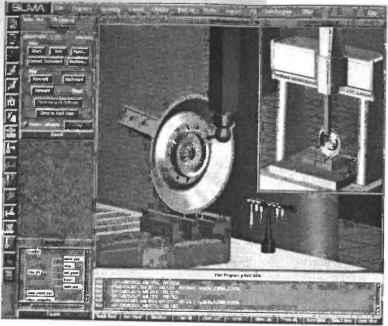 Рис. 13.12. Изображение, созданное модулем CimStation (с разрешения Adept Technology, Inc.) 1 Программное обеспечение Prosolvia (http: www.prosolvia.se). Prosolvia выпускает линейку модулей виртуального прототипирования и визуализации под названием Oxygen. Oxygen Assembly - это модуль виртуального проектирования и прототипирования, с помощью которого пользователи могут имитировать ручную сборку в виртуальной среде для обзора и анализа последовательности сборки. Oxygen Showroom позволяет рассматривать и оценивать варианты конструкции продукта в реалистичной и интерактивной среде. Oxygen MMI имитирует эргономический анализ, посредством которого пользователь может проверить расстояния, доступность, обзор и комфорт. Oxygen Sketchmap преобразует двумерные рисунки в трехмерные модели, которые могут использоваться в виртуальной среде. Oxygen также имеет программные надстройки: Oxygen Immersive Space имитирует системы пространственного погружения; Oxygen Collaboration поддерживает распределенную работу; Oxygen Peripherals поддерживает аппаратуру виртуальной реальности (систему отслеживания движений, головные дисплеи, информационные перчатки); наконец, Oxygen CAD-Exchange обеспечивает преобразование данных из CAD-систем. Программное обеспечение Tecnomatix (http: www.tecnomatix.com). Tecnomatix предлагает несколько линеек продуктов для анализа производства, сборки и допусков. ROBCAD - это набор программ для проектирования, имитации и автономного программирования производственных систем. Он состоит из различных специализированных модулей, включая ROBCAD/Line, ROBCAD Spot, ROBCAD/Paint, ROBCAD/Drill, ROBCAD/Arc, ROBCAD/Fixture, ROBCAD/Man, ROBCAD/Laser и ROBCAD/Onsit.e. VALISYS - это линейка программных продуктов для анализа размеров и допусков, а также имитации процесса контроля на координатно-измерительной' машине. В нее входят: VALISYS/Design, VALISYS/Assembly, VALISYS/CMM Offline Programming, VALISYS/Inspection, VALISYS/Analyze и VALISYS/Reverse. DYNAMO (рис. 13.13) - это линейка модулей для виртуального прототипирования. Головной модуль обеспечивает имитацию сборки и анализ площадки для обслуживания. К нему имеются дополнительные модули - DYNAMO/Engineer и DYNAMO/Link. 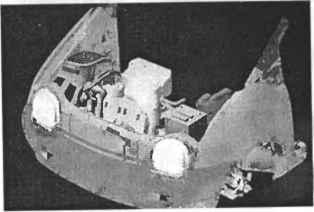 Рис. 13.13. Изображение, созданное модулем Dynamo (с разрешения Tecnomatix Technologies. Inc.) 13.7. Аппаратура Виртуальная инженерия - чисто программная технология, и поэтому сама по себе не требует какого-либо специального оборудования. Однако для взаимодействия с пользователем необходимо оборудование виртуальной реальности. Это оборудование включает в себя как устройства ввода, так и устройства вывода. Устройства вывода дают пользователю ощущения от виртуальной среды. Поскольку самый эффективный способ сенсорного восприятия - это зрение, главными компонентами систем виртуальной реальности являются устройства отображения. Эти устройства должны обеспечивать пользователю стереоскопический обзор. Доступное в настоящий момент оборудование включает головные дисплеи, бинокулярные всенаправленные мониторы, дисплеи пространственного погружения и специальные очки. Звук и осязание обогащают ощущения от виртуальной реальности, когда они используются в совокупности со зрительной системой. Типичным примером звуковой аппаратуры могут служить наушники с пространственно расширенной звуковой системой. Аппаратура осязания - это приборы с силовой обратной связью. Популярными устройствами ввода являются системы распознавания речи, следящие системы и информационные перчатки. Головные дисплеи. Головной дисплей - это устройство отображения с полным погружением. Шлем полностью закрывает глаза и позволяет смотреть только прямо перед собой. Небольшой экран, смонтированный перед глазом пользователя, дает стереоскопическое изображение. Прибор имеет встроенную следящую систему, благодаря которой изображение на дисплее меняется при изменении положения и ориентации головы пользователя. В настоящее время доступно более 40 моделей головных дисплеев. Среди них можно упомянуть FOHMD от CAE-Electronics (рис. 13.14) и Looking Glass от Polhemus Lab.
Рис. 13.14. Головной дисплей (с разрешения CAE, Inc.) Бинокулярные всенаправленные мониторы. Бинокулярный всенаправленный монитор - это механическая версия головного дисплея. Он состоит из дисплейной коробки, которая сбалансирована по весу на многозвенной стреле. Пользователь смотрит на дисплей, а движение его головы отслеживается через систему механических звеньев. Основным преимуществом бинокулярных всенаправленных мониторов перед головными дисплеями является быстрое и точное слежение. В продаже имеются бинокулярные всенаправленные мониторы ВООМ-2С от Fake Space Labs (http: www.fakespace.com) и Cyberface3 от LEEP. Дисплеи пространственного погружения. В дисплеях пространственного погружения используется панорамный видеоэкран, окружающий пользователя, так что пользователь чувствует себя погруженным в виртуальную среду. Дисплеи пространственного погружения обеспечивают большое поле зрения и свободу передвижения в виртуальной среде. В Университете штата Иллинойс (Чикаго) разработана четырехстенная система пространственного погружения CAVE. Приобрести систему CAVE можно через фирму Pyramid System. Существуют большие куполообразные дисплеи пространственного погружения, такие как Visionarium фирмы Silicon Graphics, имеющий 8 м в диаметре. Фирма Spitz Electrichorizen построила дисплей пространственного погружения диаметром 8,5 м (рис. 13.15).  Рис. 13.15. Театр виртуальной реальности (с разрешения SPITZ, Inc., Чэдс-Форд, Пенсильвания, США) □ Шторные очки. Шторные очки - это недорогое устройство отображения. Пользователь надевает устройство, напоминающее очки, которое попеременно закрывает обзор то одному, то другому глазу. Монитор или другое устройство отображения, синхронизированное с очками, имеет в два раза большую частоту обновления и попеременно показывает картинку для левого и для правого глаза. В результате на экране монитора пользователь видит стереоскопическое изображение. Данное устройство может использоваться вместе с выпускаемыми в настоящий момент дисплеями, поэтому оно экономически выгодно. Однако оно обеспечивает недостаточное погружение для того, чтобы пользователь увидел реальную среду, так как поле зрения ограничено размерами монитора. В продаже имеются шторные очки CrystalEyes от Stereographies и SGS от Tektronix. □ Устройства осязания. Устройство осязания дает ощущение физического прикосновения. Такое устройство позволяет пользователям почувствовать реальный объект через систему силовой обратной связи, создающую иллюзию работы с реальным материалом. Примером устройства осязания является джойстик с силовой обратной связью, через который пользователь ощущает силу реакции на рабочей руке. В продаже имеются джойстики HapticMater от Nissho Electronics и BSP Joystick от АЕА Technologies. Прибор Phantom фирмы SensAble Technology - это устройство осязания на базе карандаша, имеющее шесть степеней свободы (рис. 13.16). Более передовым типом устройства осязания является экзоскелет - сложная система механических звеньев, окружающая всю руку и палец, так что каждый палец и сустав независимо получают силовую обратную связь. Он объединяет в себе информационную перчатку и устройство осязания. Примерами экзоскелетов являются The Ехо-skeletal Hand Master от Sarcos и Force ArmMaster от Exos.  Рис. 13.16. Устройство осязания Phantom от SensAble Technology (с разрешения SensAble Technology и PennWell Publishing Company) □ Следящие системы. Следящие устройства используют электромагнитную, ультразвуковую, оптическую или механическую систему для определения положения и ориентации отслеживаемого объекта. Следящее устройство может быть встроено в головной дисплей для отслеживания направления взгляда и положения головы или в информационную перчатку - для отслеживания положения руки. Следящее устройство можно также прикрепить на любую часть тела. В продаже имеются такие следящие системы, как Flock of Birds от Ascension и ISOTRAK II от Polhemus (http: www.polhemus.com). Типичным примером следящих устройств с использованием ультразвуковой технологии могут служить Head-tracker от Logitech (http: www.logitech.com) и GAMS от Transition State Corporation. Механическая система используется в устройствах GyroEngine от Gyration, ADL-1 от Shooting Star Technology и Wrightrac от Vidtronics. Наконец, к устройствам с использованием оптической технологии относятся GRD-1010 от GEC Ferranti, DynaSight от Origin Instruments и RtPM от Spatial Positioning Systems. Информационные перчатки. Информационная перчатка имеет на каждом суставе пальцев руки датчики, измеряющие изгиб пальца. Положение руки в целом определяется следящей системой, прикрепленной к перчатке. Обычно информация, получаемая с перчатки, преобразуется в виртуальной среде обратно в изображение, форма и положение которого динамически изменяются, следуя за движениями руки пользователя. В продаже имеются информационные перчатки Dexterous Hand master от Exos, CyberGlove GG1801 от Virex и DataGlove от Greenleaf Medical Systems (рис. 13.17). Рис. 13.17. Информационная перчатка DataGlove (с разрешения Greenleaf Medical Systems) 13.8. Исследовательские проблемы и препятствия виртуальной инженерии Виртуальная инженерия - зарождающаяся технология. Она обладает достаточным потенциалом для того, чтобы стать значительной составляющей деятельности инженера, однако на сегодняшний день функциональность и возможности применения систем виртуальной инженерии ограничены. Чтобы виртуальная инженерия превратилась в развитую технологию, необходимо получить возможность полностью отразить функциональное поведение физических систем посредством компьютерной имитации. Обсудим некоторые связанные с этим проблемы. □ Новые средства проектирования. Виртуальное проектирование предоставляет принципиально иную среду для разработки. В ней зрение является стереоскопическим, а взаимодействие с моделью конструкции осуществляется с помощью нескольких органов чувств. Эта новая среда открывает возможности для появления новых методов проектирования и подходов к моделированию. В ближайшем будущем конструктор будет иметь возможность взять объект в руки и растянуть его или создать и изменить модель с помощью одного только голоса. Новый подход к моделированию обеспечит более естественные и интуитивные способы создания моделей. □ Моделирование процессов и физических объектов. В настоящее время возможности имитации сводятся главным образом к кинематике. Моделирование динамических систем, деформируемых систем и жидких систем обычно требует анализа методом конечных элементов, отнимающего большое количество вычислительных ресурсов. Чтобы это имело какую-то ценность в качестве средства виртуального проектирования, данный анализ необходимо производить в реальном времени. Чтобы стала возможной имитация в реальном времени, необходимо компактное и точное моделирование. Более того, модели должны содержать в себе информацию о своих физических свойствах и экспериментальные данные, демонстрирующие их физическое поведение. □ Мера возможности производства. Производственные процессы различны, каждый процесс имеет свои собственные уникальные характеристики. Таким образом, найти какую-то общую метрику, определяющую возможность производства различных продуктов, представляется трудной задачей. Необходимы исследования определений возможности производства и методологии ее оценки. Помимо простого решения типа да/нет необходимо определить количественную меру возможности производства. Кроме того, оценку возможности производства необходимо трансформировать в оценку продолжительности производственных процессов и затрат. □ Быстродействие системы. В настоящий момент качество визуализации и имитации сильно ограничивается быстродействием системы. Благодаря экспоненциальному росту скорости обработки и прогрессу технологии распределенных вычислений качество имитации улучшается. Однако быстродействие системы остается все еще слишком низким для полноценного виртуального проектирования. Для визуализации требуется детализированное трехмерное отображение и анимация с высокой частотой кадров. Оценка проекта включает анализ динамических систем и оптимизации, требующие больших вычислительных ресурсов. Кроме того, для обеспечения коллективной разработки необходимо повысить скорость работы сетей, расширить полосу пропускания и увеличить число каналов. □ Стандарт интерфейса данных. Виртуальное проектирование включает в себя взаимодействие различных пакетов прикладных программ. Моделирование детали обычно производится в CAD-системе, анализ - в программе анализа по методу конечных элементов, а компьютерная имитация - в интерактивной системе имитации производства. Для коллективной разработки необходимо, чтобы эти различные системы работали вместе. Стандартные интерфейсы баз данных и программного обеспечения являются ключом к виртуальному проектированию. □ Открытая архитектура. Открытая архитектура придает системе масштабируемость. Системы виртуального проектирования необходимо объединять с имеющимися в настоящий момент инженерными системами для получения дополнительной функциональности или решения разнотипных задач. Открытая архитектура позволяет системе задействовать большой резерв инженерных ресурсов и находить разнообразные формы применения. вопросы и задачи \. Перечислите преимущества виртуальной инженерии в применении к процессу разработки продукта. - Из каких компонентов состоит виртуальная инженерия в терминах производственного цикла? У Какие дополнительные возможности, скорее всего, потребуются современным CAD-системам для реализации в них виртуального проектирования? I- Чтобы агрегат из деталей, созданных современными CAD-системами, можно было использовать для цифровой имитации, необходимо иметь некоторую дополнительную информацию, помимо геометрических моделей компонентов и их соединений. Что это за информация? Вопросы и задачи 5. Каково наиболее популярное применение цифровых макетов в разработке продуктов? 6. Объясните, почему виртуальные прототипы делают возможным проектирование сверху вниз . 7. Объясните, каким образом виртуальная инженерия поощряет коллективную разработку. 8. Назовите две типичные программные технологии, позволяющие повысить скорость обработки графической информации при визуализации агрегатов, состоящих из множества частей. Объясните вкратце суть каждой из технологий. 9. Что такое избирательная визуализация по зрительному конусу и избирательная визуализация по зрительному присутствию ? 10. В чем состоит основное различие между головными дисплеями и всенаправ-ленными бинокулярными мониторами? 11. Объясните принцип, по которому пользователь, на котором надеты шторные очки, может видеть стереоскопическое изображение. 12. Когда на вас надета информационная перчатка, как движения ваших пальцев регистрируются датчиками на каждом суставе пальцев? Как определяется глобальное положение руки? Глава 14 Стандарты обмена данными между системами В главах 8 и 11 мы показали, что прикладные программы, например программы генерации сетки для анализа по методу конечных элементов или траектории движения инструмента станков с ЧПУ, требуют на входе технического описания продукта. Данные технических требований делятся на два типа. Первый тип данных - это данные чертежа; они включают векторное описание линий (сплошных, пунктирных, осевых, размерных и выносных) и пояснительных данных комментариев, символов и значений размеров), имеющихся на чертеже. Ко вто-юму типу данных технических требований относится представление твердотельной модели и некоторые пояснительные данные. Поэтому данные техниче-:ких требований обычно импортируются из CAD-системы - либо из системы нломатизированной разработки чертежей, либо из системы твердотельного мо-целирования. Однако, как было отмечено в главах 4 и 5, все CAD-системы хранят результаты проектирования, то есть данные технических требований, в сво-IX собственных структурах данных, формат которых зависит от конкретной :истемы. Они могут не соответствовать входному формату используемой прикладной программы. Таким образом, когда две или более CAD/CAM/CAE-сис- емы объединяются и связываются в единое приложение для совместного исполь-ювания данных, часто возникает проблема обмена данными. Фактически всегда шеется потребность связать воедино несколько систем либо внутри одной орга-шзации, либо внешне, как в случае со смежниками или поставщиками композитов. 1ля решения этой коммуникационной проблемы необходима возможность пре-бразовывать данные технических требований одной системы в форму, понятную ля других систем, и наоборот. Чтобы облегчить преобразование и не разраба-з-гвать программы-конверторы для всех возможных пар САПР, было предложено несколько стандартных форматов для хранения данных технических тре-ований. В этой главе мы вкратце рассмотрим типичные стандартные форматы. 4.1. Методы обмена данными ехнических требований азличные CAD/CAM/CAE-системы хранят данные технических требований структурах разного вида, поэтому для переноса данных необходимо преобразо-лть данные технических требований одной системы в формат другой системы. Ще один конвертор необходим для переноса данных между двумя системами в ютивоположном направлении. Следовательно, для каждой пары систем необ- ходимо иметь два конвертора. Двунаправленные стрелки для каждой пары систем (рис. 14.1, а) предполагают наличие двух конверторов. Эти конверторы для каждой конкретной пары систем называются прямыми конверторами (direct translators). Если у нас есть п различных систем, нам необходимо разработать п(п - 1) конверторов, поскольку количество пар систем равно п(п - 1)/2. Например, для обмена данными между 10 системами придется разработать 90 конверторов. Таким образом, метод прямого конвертирования непрактичен, так как требует разработки слишком большого количества конверторов при необходимости работать со множеством систем. Более того, добавление одной системы к п уже имеющимся потребует написания 2п дополнительных конверторов. 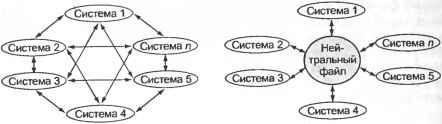 а б Рис. 14.1. Два метода обмена данными между двумя различными системами Однако обмен данными можно обеспечить, введя нейтральную структуру базы данных, называемую нейтральным файлом (neutral file), которая была бы независима от существующих САПР. Эта структура будет действовать как промежуточная точка коммуникации между различными структурами баз данных САПР (рис. 14.1, б). Таким образом, в каждой системе будет своя пара конверторов для экспорта и импорта данных в этот нейтральный формат. Конвертор, преобразующий данные из собственного формата данной системы в нейтральный формат, называется препроцессором (pre-processor), а конвертор, выполняющий обратное преобразование - постпроцессором (jmst-processor) (рис. 14.2). Соответственно, в этом случае для обмена данными между п системами потребуется 2п конверторов, и лишь два дополнительных конвертора необходимо будет добавить при введении новой системы. Иными словами, этот косвенный метод свободен от присущего прямому методу недостатка, когда требовалось писать все возрастающее количество программ. Это основная причина, по которой косвенный метод принят в качестве главного метода обмена данными между различными системами, несмотря на то что в сравнении с прямым методом у него имеются некоторые недостатки. В частности, прямые конверторы работают быстрее косвенных, и создаваемые ими файлы данных обычно имеют меньший размер, чем нейтральные файлы, генерируемые косвенными конверторами. Файл данных в собственном формате конкретной системы обычно также оказывается меньше нейтрального файла из-за обобщенной природы последнего. Когда мы переносим данные технических требований через нейтральный файл, некоторая информация, как правило, теряется, особенно информация о топологическом дереве и ограничениях в системах параметрического моделирования.  Рис. 14.2. Обмен данными с использованием нейтрального файла В этой главе мы рассмотрим три типичных формата нейтрального файла: IGES (Initial Graphics Exchange Specification - первоначальная спецификация обмена графическими данными), DXF (Drawing interchange Format - формат обмена чертежами) и STEP (STandard for Exchange of Product model data - стандарт обмена данными о модели продукта). В настоящее время IGES является самым популярным форматом нейтрального файла, а формат DXF используется главным образом для обмена данными чертежей. STEP - это стандартный формат данных, используемый для хранения полной информации обо всем жизненном цикле продукта, включая проектирование, анализ, производство, контроль качества, испытания и обслуживание помимо обычных данных технических требований. В настоящее время CAD-системы, поддерживавшие формат IGES, ориентированы на переход к формату STEP. 14.2. Формат IGES В 1979 г. перед техническим комитетом, который состоял из компании Boeing, компании General Electric и Национального бюро стандартов США (National Buerau of Standards, теперь Национальный институт стандартов и технологии), была поставлена задача разработать метод обмена данными в рамках программы интегрированного автоматизированного производства (ICAM) для ВВС США. Результатом этих усилий явилось описание формата IGES версии 1.0, опубликованное в январе 1980 г. В 1981 г. оно было принято Американским Национальным институтом стандартов (ANSI) в качестве стандарта. IGES был первым стандартным форматом обмена данными, разработанным для нужд передачи данных технических требований между различными САПР. Ранние версии IGES были неявным образом ориентированы на CAD/CAM-системы 1970-х и начала 1980-х гг., то есть главным образом на обмен чертежами. В более поздних версиях спектр типов данных, подлежащих обмену, был расширен. Например, версия 2.0 поддерживала обмен данными анализа по методу конечных элементов и данными печатных плат, в версии 3.0 были расширены возможности пользовательских макрокоманд, играющих важную роль при обмене стандартными библиотеками деталей, в версии 4.0 была введена поддержка дерева CSG, а в версии 5.0 появилась обработка данных структуры B-Rep. GES-файл состоит из шести разделов, которые должны идти в следующем юрядке (рис. 14.3): Flag (Флаг, необязательный раздел), Start (Начало), Global (Глобальные данные), Directory Entry, или DE (Запись в каталоге), Parameter Data, или PD (Параметрические данные) и Terminate (Конец). Пять обязательных разделов идентифицируются буквами S, G, D, Р и Т, как показывает столбец 73 каждой записи на рис. 14.4. Запись (record) - это строка из 80 символов. IGES-файл, Соответствующий чертежу на рис. 14.5, показан на рис. 14.4. Раздел Flag (необязательный) Раздел Start Раздел Global Раздел Directory Entry Раздел Parameter Data Раздел Terminate Рис. 14.3. Структура IGES-файла Раздел Flag используется только в сжатом ASCII-формате и бинарном формате. Данные в IGES-файле могут быть представлены в двух форматах: ASCII и бинарном. Формат ASCII имеет две разновидности: фиксированную длину строки 80 символов (рис. 14.4) и сжатую форму. Сжатая форма - это не что иное, как ASCII-файл, сжатый путем устранения пробелов между записями. Подробное описание сжатой формы можно найти в [166]. Бинарный формат файла являет собой бинарное представление данных в виде потока битов в формате с фиксированной длиной записи. Чтобы идентифицировать формат файла как сжатый ASCII, в столбец 73 раздела Flag записывается символ С. Раздел Flag состоит из одной записи (строки) и предшествует разделу Start. В бинарном формате первый байт (8 бит) раздела Flag содержит ASCII-символ В, служащий идентификатором типа файла. Обратите внимание, что на рис. 14.4 раздел Flag отсутствует, так как на этом рисунке представлен IGES-файл в формате с фиксированной длиной записи. В разделе Start дается описание файла в форме, воспринимаемой человеком. В нем указывается система, являющаяся источником данных, препроцессор и описываемый продукт. На рис. 14.4 записи, у которых в столбце 73 стоит символ S, принадлежат разделу Start. Раздел Global содержит информацию о препроцессоре, а также информацию, необходимую постпроцессору для интерпретации файла. В частности, в этом разделе имеются следующие элементы: □ символы, используемые в качестве разделителей между отдельными полями и записями (на рис. 14.4 для этого используются соответственно запятая и точка с запятой); □ имя самого IGES-файла; □ количество значащих цифр в представлении целых чисел и чисел с плавающей точкой в системе-источнике; □ дата и время создания файла; □ масштаб пространства модели; □ единицы измерения модели; □ минимальная разрешающая способность и максимальные значения координат; □ имя создателя файла и название организации. Глава 14. Стандарты обмена данными между системами IGES file generated from an AutoCAD drawing by the IGES translator from Autodesk, Inc., translator version 1GES0UT-3.04. 10HB:WKEYHOLE, 14HB:WKEYH0LE. IGS,27HAutoCAD-12 c2 International OUT-3. 04, 32, 38, 6, 99, 15, 10HB:WKEYHOLE, 1. 0, 1, 4H1NCH, 32767, 3. 2767D1 06. 211545, 5. 0D-9, 5.0, l3HShin Dong Koo, 12H GoldStar Gl.6,0;
100, 0. 0, 30. 0, 30. 0, 2. 3D1, 54. 0, 3. 7D1, 54. 0; 110,23.0,58. 0, 0. 0,37. 0,58. 0, 0.0; 110, 23.0, 54. 0, 0.0,23. 0, 58.0,0.0; 110,37. 0, 54. 0, 0. 0, 37. 0, 58.0,0.0; 212, 1, 2, 3. 2, 3. 0, 1 0. 0, 0, 0, 2. 84D1,6. 3705885482016D1, 0. 0.-2H14; 106, 1, 3, 0. 0, 23. 0, 58. 0, 23. 0, 58. 0, 23. 0, 6. 4205885482016D1 , 106, 1, 3, 0. 0,37. 0, 58. 0, 37. 0, 58. 0, 37. 0, 6. 4205885482016D1; 214, 1, 3. 0, 1. 0, 0. 0, 23. 0, 6. 2205885482016D1, 30. 0, 6. 2205885482016D1 214, 1, 3. 0, 1. 0, 0. 0, 37. 0, 6. 2205885482016D1, 30. 0, 6. 2205885482016D1 216, 9, 15, 17, 11,13; 212, 1, 2, 4. 0, 3. 0, 1 1. 5707963267949D0, 0, 0, 6. 5399660145317D1, 2 95D1 0 0 2H53 106, 1, 3, 0. 0, 37. 0, 58. 0, 37. 0, 58. 0, 6. 8899660145317DI, 58. 0; 106, 1, 3, 0. 0, 30. 0, 5. 0, 30. 0, 5. 0, 6. 8899660145317D1, 5. 0; 214, 1, 3. 0, 1. 0, 0. 0, 6. 6899660145317D1, 58. 0, 6. 6899660145317Dlt 3. 1SD1; 214, 1, 3. 0, 1. 0, 0. 0, 6. 6899660145317D1, 5. 0, 6. 6899660145317D1, 3.15D1; 216, 21, 27, 29, 23, 25; 212, 1, 5, 6. 0, 3. 0, 1 4. 8571836262035D-1,0, 0, -3. 4208387606424D0, 1. 4053290730212D1,0. 0, 5Шс50; 214, 2, 3. 0, 1. 0, 0. 0, 7. 8915046446839D0, 1. 832890608709D1, 3. 0D1, 3. 0D1, -2. 7205731258678DO, 1. 2726781008893D1; 214, 1, 3. 0, 1. 0, 0. 0, 5. 2108495355316D1, 4. 167109391291D1, 3. 0D1, 3. 0D1; 206, 33,35,37,3.0D1,3. 0D1; 110, 2. 8D1, 30. 0, 0. 0, 3. 2D1, 30. 0, 0. 0; 110, 3. 0D1, 28. 0, 0. 0, 3. 0D1, 32. 0, 0. 0; 110, 2. 6D1, 30. 0, 0. 0, 3. 0, 30. 0, 0. o; 110, 34. 0, 30. 0, 0. 0, 57. 0. 30. 0, 0. 0; 110, 3. 0D1, 26. 0, 0. 0, 3. 0D1, 3. 0, 0. 0; 110, 3. 0D1, 34. 0, 0. 0, 3. 0D1, 57. 0, 0. 0; SOOO0OO2G00OO004D00O0052P00O0032 S0000001 S0000002 , 12H1GESG0000001 ,13H9307G0000002 G0000003 OOOOOOOOD0000001 D0000002 OOOOOOOOD0000003 D0000004 OOOOOOOOD0000005 D0000006 00000000D0000007 D0000008 00010100D0000009 D0000010 00010100D0000011 D0000012 00010100D0000013 D0000014 00010100D0000015 D0000016 00010100D0000017 D0000018 00000101D0000019 D0000020 00010100D0000021 D0000022 00010100D0000023 D0000024 00010100D0000025 D0000026 00010100D0000027 D0000028 00010100D0000029 D0000030 OOOOOI01D0000031 D0000032 00010100D0000033 D0000034 00010100D0000035 D0000036 00010100D0000037 D0000038 00000101D0000039 D0000040 00000000D0000041 D0000042 OOOOOOO0DOOOOO43 D0000044 0OOO0OOODOOOOO45 D0000046 00000000D0000047 D0000048 00000000D0000049 D0000050 OOOOOOOOD0000051 D0OOOO52 1P0000001 3P0000002 5P0000003 7P0000004 9P0000005 11P0000006 13P0000007 i 15P0000008 ; 17P0000009 19P0000010 21P0000011 21P0000012 23P0000013 25P0000014 27P0000015 27P0000016 29P0000017 29P0000018 31P0000019 33P0000020 33P0000021 35P0000022 35P0000023 37P0000024 37P0000025 39P0000026 41P0000027 43P0000028 45P0000029 47P0000030 49P0000031 51P0000032 T0000001 Рис. 14.4. IGES-файл, соответствующий чертежу на рис. 14.5 14.2. Формат IGES 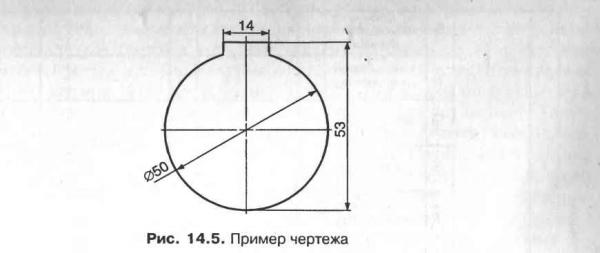 На рис. 14.4 записи с символом G в столбце 73 принадлежат разделу Global. Раздел Directory Entry содержит список всех элементов и некоторых их атрибутов. В IGES-файле все данные технических требований представлены в виде списка предопределенных элементов: геометрических (линии, кривые плоскости, поверхности) и пояснительных (комментарии и значения размеров). Каждому элементу присваивается определенный номер типа. Геометрические элементы, определенные в каждой версии IGES, перечислены в табл. 14.1. Обратите внимание, что впервые твердые тела были введены в качестве геометрических элементов в версии 4.0. Запись о каждом элементе занимает две 80-символьных строки, разделенные в сумме на двадцать 8-символьных полей. Первое и одиннадцатое поля (начало второй строки каждого элемента) содержат номер типа элемента. Второе поле содержит указатель на запись в разделе Parameter Data, где фактически хранятся данные, определяющие элемент. Этот указатель является просто порядковым номером соответствующей записи в разделе PD. В остальных полях хранятся атрибуты: начертание линии, номер слоя, матрица преобразования, толщина линии и цвет. Раздел Parameter Data содержит фактические данные, описывающие каждый из элементов, перечисленных в разделе Directory Entry. Например, элемент, представляющий собой прямую линию, определяется шестью координатами двух ее конечных точек. Хотя каждый элемент всегда имеет две строки в разделе DE, количество записей, требуемое для каждого элемента в разделе PD, различно для разных элементов и зависит от количества необходимых данных. Параметрические данные указываются в свободном формате в столбцах 1-64. Разделитель полей, определенный в разделе Global, используется для разделения параметров, а определенный там же разделитель записей - для обозначения конца списка параметров. Обычно в качестве разделителя полей используется запятая, а в качестве разделителя записей - точка с запятой. Столбцы 66-72 во всех записях раздела PD содержат обратный указатель на соответствующий элемент в разделе DE. Обратите внимание, что этот указатель представляет собой порядковый номер первой из двух строк, отведенных под каждый элемент в разделе DE. В столбцах 74-80 хранится порядковый номер записи, которой они принадлежат. Раздел Terminate содержит единственную запись, в которой в целях контроля хранится количество записей в каждом из четырех предшествующих разделов. 1 ... 22 23 24 25 26 27 28 29 |
|
| |||